
In the previous article we tried to analyze what is the Contrast Ratio in a LED driver and how the non-idealities are giving a boundary on the minimum allowable PWM period. That was quite worth a full article, but a big part was indeed missing.
Here we will go through how the PWM period and the non-idealities are related to each other. From this, how a final PWM requirement can be derived directly from the non-ideal average current.
In many application notes the slew rate of the output of some drivers is overlooked, due to the fact that is assumed to have a driver working properly, by trustfully following what has been implemented by the application engineer. Often, is just treated the most important aspect of the output ripple, but is not always the only aspect. Let’s take into consideration the case of a constant driver Infineon ILD4001 and its related AN213. The question is, if a product shall be optimized and analyzed, how much closely one should follow the reference design? The AN does not talk about rise and fall times of the output driver, rather “only” about the current ripple. Sometimes, may be worth to just check if an optimization is possible by looking at other less dramatic non idealities, to push a device to its boundaries, while cross checking the tradeoffs.
The average current is a lie
As stated in the previous article, the PWM frequency must be higher than the minimum on-time 



But at this limit, there is practically no duty cycle exploitable, since any less duration will not bring enough time to fully reach the programmed output. In fact, from the moment in which the PWM duty cycle, at this fast frequency, goes from 100% to somewhere below, the actual peak average dimming level cannot be precisely controlled since the driver does not have the time to fully turn on or fully turn off, or even both. Why this? Because usually it is used a DC-DC constant current driver, which uses an inductor to provide the current and by definition such inductor with a constant voltage applied, will have a current which increase and decrease with certain linear slopes, assumin no saturation occurs.
The Figure 1 is worth a thousand words, showing a Duty Cycle scenario when dealing with dimming PWM frequency which is too high with respect to the rise and fall times of the current slopes in red, in 3 possible dimming situations, to explain the previous paragraph. It is also shown again what are the

It is therefore important to know the slew rate when the PWM period is too short. Too short that the on and off time will be comparable with the duration of the slope relative to the current. But will this be a problem? Can I push the limits of the dimming PWM frequency?
Let’s try to model this current to derive the control requirements. But before, here is mentioned the driver used to model the current.
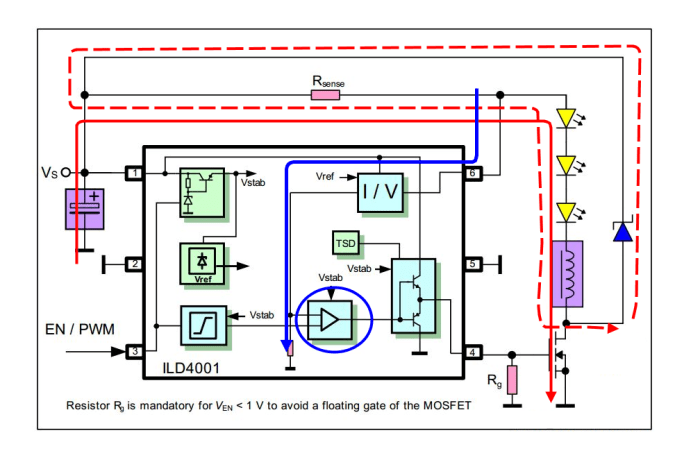
A relatively simple circuit topology: hysteretic buck converter
This architecture (an ILD4001 driver), with a fully on signal, turns on the MOSFET, thus charging the inductor, up to when a certain control voltage is reached, then turn all off thus discharging the inductor down to when a lower threshold in the control voltage is reached. Therefore does not have a fixed timing and the frequency and duty cycle (this time the DC-DC one, not the dimming one) varies with load and supply. On the other side, this architecture helps in dealing with PWM requirements very easily and being a simple one, may be more dependable and bring cheap designs. Here a basic schematic of such circuit is shown:
From the topology to the true average current calculation
In the following equations, from the Figure 2, 


Here I will neglect the inductor parasitic resistance, which somehow bring the same effect of 
When the inductor charges (MOSFET on), will provide a current with a certain positive slope:

When discharge (MOSFET off), there will be a negative slope:

Another important thing to take into consideration is that a generic current ramp increase 
![\Delta I = S[A/s] \cdot t[s]](https://s0.wp.com/latex.php?latex=%5CDelta+I+%3D+S%5BA%2Fs%5D+%5Ccdot+t%5Bs%5D+&bg=ffffff&fg=424242&s=0&c=20201002)
The current peak, as can be understood by looking a Figure 1, is the result of the slope multiplied by the time in which this slope exist (assuming to be short enough to have no core saturation of the inductor). Therefore current highest value limited by the driver is 



Where 


which may be or not equal to
For simmetry, if the 

Again, if this current is lower, the duration of the slope does not represent the full current swing anymore, so can be renamed as 

From this basic concept can be found few different scenarios in which the current behaves and affect the average current, depending on the PWM period and duty-cycle.
Modelling the average current
We are dealing with triangle waveforms with rise and falling slopes; and also with rectangle and trapezoidal shapes, as can be seen later here. Therefore few cases must be considered. Also, a more general one will be derived out of basic simple models.
Example 1:
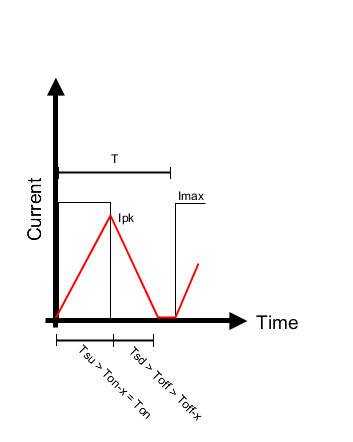
This is a very bad scenario. The driver used in these conditions is all but predictable and the proper dimming performance is completely out of linearity. Here I will show this on numbers.
The current rises with a 

Let’s call 




The duration of the falling slope is

From the average value of a triangular signal, with time on x-axis and current on y-axis, the average current is:

Where 

Now if for simplicity we set the ramps as equals, 





Which means:

The simplified result in eq. (13) is also intuitive: with the rise slope constant, since is imposed by the hardware, the average current is proportional to the square of duty cycle. Also, 

This model works only if the current waveforms are triangle, therefore is valid up to the moment the ramp will increase to the maximum current allowed by the driver, 

When the PWM changes so that the conditions (14) become false, is needed to model another example.
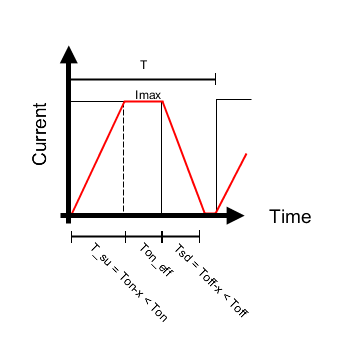
Example 2:
 .
.This case is still a representation of a bad PWM frequency selection, but the result is an higher average current than expected and very limited duty-cycle dynamics. This happens from the moment in which the condition (14) is not true anymore.
Here the area calculation principle is the same, but it is not anymore only made by two triangles rectangles. Because there is also the area in which the current is 


Now the falling ramp starts from the maximum current

Because 

Trying to simplify a bit the term of the triangle area by neglecting

Regarding the ramps, now the maximum current and their slopes are design dependent, and if their contribution is large, a slow rising/falling slope with a high maximum current, due to its square term, can produce a high contribution. The Example 2, as can be conceived from the picture, holds only if the rise slope lead to an higher current than the maximum, thus needing the regulator to activate to limit within

But now, if 
A complete scenario
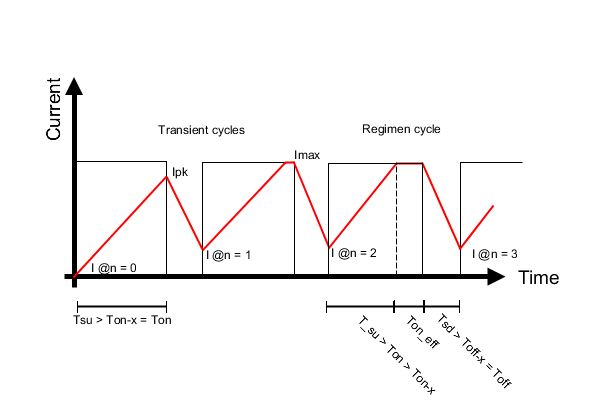
In this Figure 5, after the first cycle, the PWM period is so short to not let the current completely extinguish during the off-time, the next cycle will start from an higher current (I@n = 1). This lead to a transient event (transient cycles in Figure 5), which then will eventually stabilize over time (regimen cycle).
To properly model this situation, let’s take the rise from I@n=0 (herein called 


Considering that the driver will correctly limit any current up to 

As a result, when the ramp takes requires more time than 



![\begin{cases} I_{pk} = I_n + S_r \cdot \left[ \frac{I_{max}-I_n}{S_r} - f\cdot \left( \frac{I_{max}-I_n}{S_r} - (t_{on}-t_d) \right) \right] \\ \forall \frac{I_{max} - I_n}{S_r} \leq (t_{on}-t_d), f = 0; \\ \forall \frac{I_{max} - I_n}{S_r} > (t_{on}-t_d), f = 1 \end{cases}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Bcases%7D+I_%7Bpk%7D+%3D+I_n+%2B+S_r+%5Ccdot+%5Cleft%5B+%5Cfrac%7BI_%7Bmax%7D-I_n%7D%7BS_r%7D+-+f%5Ccdot+%5Cleft%28+%5Cfrac%7BI_%7Bmax%7D-I_n%7D%7BS_r%7D+-+%28t_%7Bon%7D-t_d%29+%5Cright%29+%5Cright%5D+%5C%5C+%5Cforall+%5Cfrac%7BI_%7Bmax%7D+-+I_n%7D%7BS_r%7D+%5Cleq+%28t_%7Bon%7D-t_d%29%2C+f+%3D+0%3B+%5C%5C+%5Cforall+%5Cfrac%7BI_%7Bmax%7D+-+I_n%7D%7BS_r%7D+%3E+%28t_%7Bon%7D-t_d%29%2C+f+%3D+1+%5Cend%7Bcases%7D&bg=ffffff&fg=424242&s=0&c=20201002)
Now the average rising current is the area of the trapezoid shape of the current path on the time axys (see Figure 5), divided by the duration of the PWM period:

If 

The constant current contibution, with the help of the same binary coefficient

The falling, like the rising, will follow a trapezoidal shape, will start from

This means that the 




With all the

Extending the terms and the condition of existence:

Now, just for the sake of analysis and developing all the terms
![\begin{cases} I_{avg} = \frac{1}{kT}\displaystyle\sum_{n=0}^{k} t_{on} \cdot \frac{I_n + I_n + S_r \cdot \left[ \frac{I_{max}-I_n}{S_r} - f\cdot \left( \frac{I_{max}-I_n}{S_r} - t_{on} \right) \right] }{2} + (1-f) \cdot \left(t_{on} - \frac{I_{max} - I_n}{S_r}\cdot I_{max} \right) + t_{off} \cdot \frac{I_{n+1} + I_n + S_r \cdot \left[ \frac{I_{max}-I_n}{S_r} - f\cdot \left( \frac{I_{max}-I_n}{S_r} - t_{on} \right) \right] }{2} \\ \forall \frac{I_{max} - I_n}{S_r} \leq t_{on}, f = 0 \\ \forall \frac{I_{max} - I_n}{S_r} > t_{on}, f = 1 \end{cases}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Bcases%7D%C2%A0+I_%7Bavg%7D+%3D%C2%A0+%5Cfrac%7B1%7D%7BkT%7D%5Cdisplaystyle%5Csum_%7Bn%3D0%7D%5E%7Bk%7D%C2%A0t_%7Bon%7D+%5Ccdot+%5Cfrac%7BI_n+%2B%C2%A0%C2%A0%C2%A0%C2%A0%C2%A0I_n+%2B+S_r+%5Ccdot+%5Cleft%5B+%5Cfrac%7BI_%7Bmax%7D-I_n%7D%7BS_r%7D+-+f%5Ccdot+%5Cleft%28+%5Cfrac%7BI_%7Bmax%7D-I_n%7D%7BS_r%7D+-+t_%7Bon%7D+%5Cright%29+%5Cright%5D%C2%A0%C2%A0%C2%A0%C2%A0%C2%A0%C2%A0%C2%A0+%7D%7B2%7D+%2B+%281-f%29+%5Ccdot+%5Cleft%28t_%7Bon%7D+-%C2%A0+%5Cfrac%7BI_%7Bmax%7D+-+I_n%7D%7BS_r%7D%5Ccdot+I_%7Bmax%7D+%5Cright%29+%2B%C2%A0+t_%7Boff%7D+%5Ccdot+%5Cfrac%7BI_%7Bn%2B1%7D+%2B%C2%A0%C2%A0%C2%A0I_n+%2B+S_r+%5Ccdot+%5Cleft%5B+%5Cfrac%7BI_%7Bmax%7D-I_n%7D%7BS_r%7D+-+f%5Ccdot+%5Cleft%28+%5Cfrac%7BI_%7Bmax%7D-I_n%7D%7BS_r%7D+-+t_%7Bon%7D+%5Cright%29+%5Cright%5D%C2%A0%C2%A0+%7D%7B2%7D+%5C%5C+%5Cforall+%5Cfrac%7BI_%7Bmax%7D+-+I_n%7D%7BS_r%7D+%5Cleq+t_%7Bon%7D%2C+f+%3D+0+%5C%5C+%5Cforall+%5Cfrac%7BI_%7Bmax%7D+-+I_n%7D%7BS_r%7D+%3E+t_%7Bon%7D%2C+f+%3D+1+%5Cend%7Bcases%7D&bg=ffffff&fg=424242&s=0&c=20201002)
The result tell us that by computing the eq. (27) over all the periods, knowing the maximum current of the driver and the PWM signal applied, the eq. (29) can be issued for each cycle, taking into account the hisotry of the previous samples. In this expanded equation is possible to spot a familiar situation with the Example 1, by developing under the conditions to have 



which is the same square proportionality with the duty cycle seen in the Example 1. Which means that again, is all but linear. Also, normally you don’t want to have to compute all these equations to know the average current, and by making the ramp time negligible w.r.t PWM periods, all will reduced to

keeping all the relations linear.
The slew-rate of the output which drives the PWM requirements
After all this computation, the conclusion is that the best way to use a constan current driver and in general any PWM based system, is to minimize the slew rate of the PWM signal with respect to its period. And here is shown why, in terms of controllability, design times and accuracy. But now, what will be such requirements for a designer or for the controller?
The rise and fall times will just need to be negligible, thus always let the current reach


Knowing that there is a slew-rate when turning on, the minimum on-time will therefore be:

while, assuming thedelay time

Secondly, is possible to find the minimum PWM period:

Because this number is suspiciously low, must be remembered that at the edge ofthis requirement there is no resolution available, because ifthe controller can be precise, the driver will not and instead of the nice (and normally known) eq. (30), we will have to deal with the eq. (29). So the suggestion is to have:

This is the basic requirement that is a must. Also,

2 thoughts on “Dimming LEDs (part 2/3) – Sneaky non-linear events while using the PWM technique”